The GPU Platform Control Plane: Policy as Code, Not Just Schedulers

GPUs are sold as products but operated like infrastructure. A four-lane blueprint for what a real GPUaaS control plane looks like.
GPU platforms have become the backbone of modern AI. Startups and enterprises now deploy large language models, embedding pipelines, and inference services on clusters of high-end GPUs. Yet despite all this sophistication, most GPU platforms today are still operated using a fragile mix of YAML, scripts, tickets, and human judgment.
What's missing is not a better scheduler. What's missing is a real control plane.
GPUs Are Being Sold as Products, But Operated Like Infrastructure
When customers buy GPU capacity, they are not buying machines. They are buying product guarantees such as:
- entitlements ("I paid for 4 H100s or MI300X")
- SLAs ("low latency, no preemption")
- isolation ("no noisy neighbors")
- compliance ("EU-only, dedicated hardware")
- lifecycle semantics ("scale up, scale down, offboard cleanly")
But today, those guarantees live in contracts, internal runbooks, tribal knowledge and best-effort operational discipline. They are not encoded into the system. That gap is why GPU platforms struggle with:
- noisy neighbors
- broken SLAs
- unpredictable onboarding
- chaotic scaling
- compliance gaps
- constant manual firefighting
A Control Plane Is Not an Orchestrator
Most GPU platforms assume their "control plane" is Kubernetes, Slurm, or a scheduler. It isn't. Those systems decide how workloads run. A real control plane decides:
- who is allowed to run what
- where workloads may be placed
- how much capacity a tenant is entitled to
- whether a request must be approved
- what isolation rules apply
- what happens on failure
- how data must be retained or destroyed
Those are product and governance decisions, not scheduling decisions.
The 4-Lane Blueprint for a GPUaaS Control Plane
To make this concrete, here is a swimlane blueprint that separates responsibilities into four distinct layers:
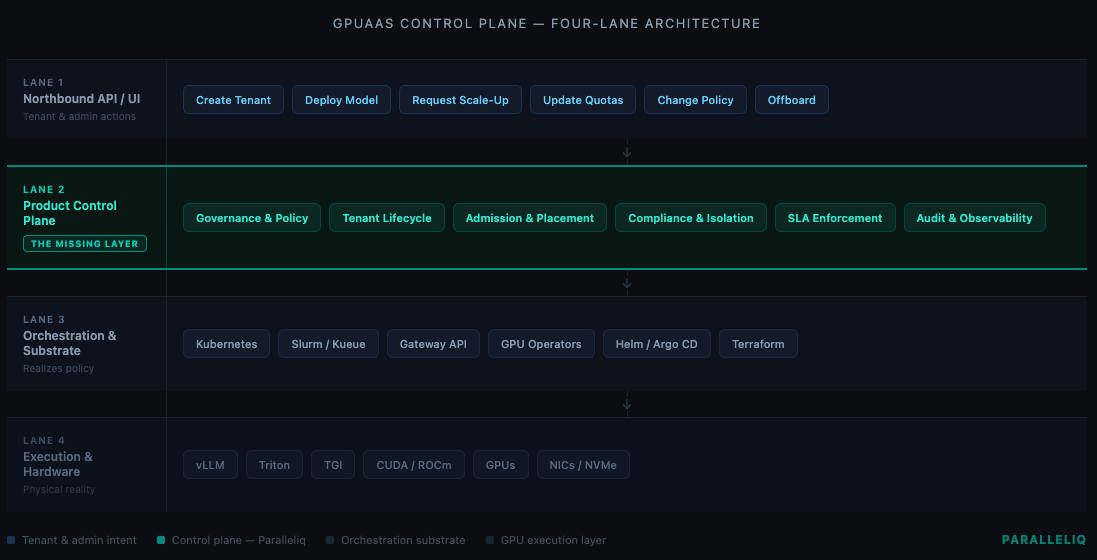
Lane 1 — Northbound Product API / UI
Tenant and admin actions such as:
- create tenant
- deploy model
- request scale-up
- change batch size
- request GPU sharing
- update quotas
- offboard tenant
These are product-level intents.
Lane 2 — Product Control Plane
Policy-as-Code • Workflow-as-Code • Lifecycle State Machines
This is the missing layer. It owns:
- tenant entitlements and quotas
- SLA tiers and isolation rules
- admission control
- placement policies
- privacy and compliance rules
- degradation and preemption policies
- onboarding and offboarding workflows
Crucially, these are not scripts. They are:
- declarative policies
- versioned rules
- durable workflows
- explicit state machines
This is where Policy as Code actually lives.
Lane 3 — Orchestration & Substrate Control
This layer turns control-plane decisions into reality:
- Kubernetes
- Slurm / Kueue
- Gateway API / inference gateways
- GPU operators
- Helm / Argo CD
- Terraform / Ansible
- CNI / CSI
It does not decide policy. It only realizes policy.
Lane 4 — Execution & Hardware
Where work actually happens:
- vLLM, Triton, TGI
- PyTorch
- ROCm / CUDA
- GPUs
- NICs
- NVMe
This is the physical reality layer.
Policy as Code: The Core of the Control Plane
The key idea is that GPU platforms need a policy-as-code control plane, not just a scheduler. Instead of writing documents like:
"Enterprise tenants must run on dedicated GPUs in EU clusters and cannot be preempted."
You encode:
# Example: tenant policy-as-code configuration
tenant:
tier: enterprise
isolation: dedicated
data_residency: eu-only
allow_preemption: false
allow_gpu_sharing: falseAnd the control plane enforces it by:
- rejecting invalid requests
- constraining placement
- selecting eligible clusters
- configuring schedulers
- applying isolation rules
- blocking unsafe actions
This is exactly how hyperscalers work internally. GPU platforms today simply don't have this layer.
Workflows, Not Scripts
A real control plane is workflow-driven. Examples:
- tenant onboarding
- quota increases
- SLA upgrades
- capacity exhaustion
- incident response
- offboarding and data destruction
These are not bash scripts. They are:
- long-running processes
- with approvals
- retries
- compensations
- audit trails
- explicit state transitions
That's why Lane 2 must be implemented as: Policy-as-Code + Workflow-as-Code + Durable State Machines
Why Is This Important
Without this layer, GPU platforms are forced to operate like fragile infrastructure projects instead of reliable products. That's why we see:
- unpredictable performance
- noisy neighbors
- broken SLAs
- chaotic onboarding
- manual firefighting
- compliance gaps
A programmable control plane fixes this by turning:
- product promises
- governance rules
- lifecycle semantics
into machine-enforceable reality.
The Missing Layer
Kubernetes orchestrates containers. Slurm schedules jobs. vLLM runs inference. Llm-d routes and scales inference traffic. But none of those systems know what a tenant, an SLA, or a privacy tier is. That knowledge belongs in a real control plane. And that control plane must be built on policy as code, not scripts.
Where Paralleliq Fits
Once you have this control plane architecture in place, the next question is whether it's actually operating efficiently. That's where Paralleliq comes in — the model-aware optimization layer that sits above any control plane and tells you whether your fleet is performing as intended. Are models on the right GPU tiers? Is dark capacity accumulating? Is a CPU bottleneck throttling your GPUs while your control plane reports everything healthy?
Paralleliq is the model-aware GPU fleet optimization layer for AI infrastructure. Start with [piqc](https://github.com/paralleliq/piqc) — the source-available GPU waste scanner — or [reach out](mailto:info@paralleliq.ai) to discuss the full optimization layer for your fleet.